

Flexible monocopter drone from Singapore, which can be completely rolled up
Motor and flexible wing are all this drone needs
It turns out that you don’t need a lot of hardware to make a flying robot. Flying robots are usually way, way, way over-engineered, with ridiculously over the top components like two whole wings or an obviously ludicrous four separate motors. Maybe that kind of stuff works for people with more funding than they know what to do with, but for anyone trying to keep to a reasonable budget, all it actually takes to make a flying robot is one single airfoil plus an attached fixed-pitch propeller. And if you make that airfoil flexible, you can even fold the entire thing up into a sort of flying robotic swiss roll.
This type of drone is called a monocopter, and the design is very generally based on samara seeds, which are those single-wing seed pods that spin down from maple trees. The ability to spin slows the seeds’ descent to the ground, allowing them to spread farther from the tree. It’s an inherently stable design, meaning that it’ll spin all by itself and do so in a stable and predictable way, which is a nice feature for a drone to have—if everything completely dies, it’ll just spin itself gently down to a landing by default.
The monocopter we’re looking at here, called F-SAM, comes from the Singapore University of Technology & Design, and we’ve written about some of their flying robots in the past, including this transformable hovering rotorcraft. F-SAM stands for Foldable Single Actuator Monocopter, and as you might expect, it’s a monocopter that can fold up and uses just one single actuator for control.
There may not be a lot going on here hardware-wise, but that’s part of the charm of this design. The one actuator gives complete directional control: increasing the throttle increases the RPM of the aircraft, causing it to gain altitude, which is pretty straightforward. Directional control is trickier, but not much trickier, requiring repetitive pulsing of the motor at a point during the aircraft’s spin when it’s pointed in the direction you want it to go. F-SAM is operating in a motion-capture environment in the video to explore its potential for precision autonomy, but it’s not restricted to that environment and doesn’t require external sensing for control.
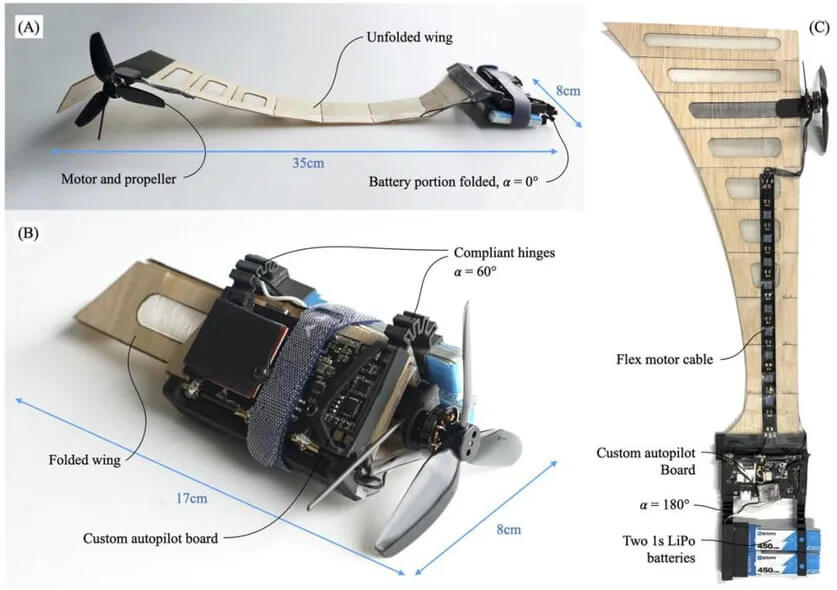
While F-SAM’s control board was custom designed and the wing requires some fabrication, the rest of the parts are cheap and off the shelf. The total weight of F-SAM is just 69g, of which nearly 40% is battery, yielding a flight time of about 16 minutes. If you look closely, you’ll also see a teeny little carbon fiber leg of sorts that keeps the prop up above the ground, enabling the ground takeoff behavior without contacting the ground.
You can find the entire F-SAM paper open access here, but we also asked the authors a couple of extra questions.
IEEE Spectrum: It looks like you explored different materials and combinations of materials for the flexible wing structure. Why did you end up with this mix of balsa wood and plastic?
Shane Kyi Hla Win: The wing structure of a monocopter requires rigidity in order to be controllable in flight. Although it is possible for the monocopter to fly with more flexible materials we tested, such as flexible plastic or polymide flex, they allow the wing to twist freely mid-flight making cyclic control effort from the motor less effective. The balsa laminated with plastic provides enough rigidity for an effective control, while allowing folding in a pre-determined triangular fold.
Can F-SAM fly outdoors? What is required to fly it outside of a motion capture environment?
Yes it can fly outdoors. It is passively stable so it does not require a closed-loop control for its flight. The motion capture environment provides its absolute position for station-holding and waypoint flights when indoors. For outdoor flight, an electronic compass provides the relative heading for the basic cyclic control. We are working on a prototype with an integrated GPS for outdoor autonomous flights.
Would you be able to add a camera or other sensors to F-SAM?
A camera can be added (we have done this before), but due to its spinning nature, images captured can come out blurry. 360 cameras are becoming lighter and smaller and we may try putting one on F-SAM or other monocopters we have. Other possible sensors to include are LiDAR sensor or ToF sensor. With LiDAR, the platform has an advantage as it is already spinning at a known RPM. A conventional LiDAR system requires a dedicated actuator to create a spinning motion. As a rotating platform, F-SAM already possesses the natural spinning dynamics, hence making LiDAR integration lightweight and more efficient.
Your paper says that “in the future, we may look into possible launching of F-SAM directly from the container, without the need for human intervention.” Can you describe how this would happen?
Currently, F-SAM can be folded into a compact form and stored inside a container. However, it still requires a human to unfold it and either hand-launch it or put it on the floor to fly off. In the future, we envision that F-SAM is put inside a container which has the mechanism (such as pressured gas) to catapult the folded unit into the air, which can begin unfolding immediately due to elastic materials used. The motor can initiate the spin which allows the wing to straighten out due to centrifugal forces.
Do you think F-SAM would make a good consumer drone?
F-SAM could be a good toy but it may not be a good alternative to quadcopters if the objective is conventional aerial photography or videography. However, it can be a good contender for single-use GPS-guided reconnaissance missions. As it uses only one actuator for its flight, it can be made relatively cheaply. It is also very silent during its flight and easily camouflaged once landed. Various lightweight sensors can be integrated onto the platform for different types of missions, such as climate monitoring. F-SAM units can be deployed from the air, as they can also autorotate on their way down, while also flying at certain periods for extended meteorological data collection in the air.
What are you working on next?
We have a few exciting projects on hand, most of which focus on the ‘do more with less’ theme. This means our projects aim to achieve multiple missions and flight modes while using as few actuators as possible. Like F-SAM which uses only one actuator to achieve controllable flight, another project we are working on is the fully autorotating version, named Samara Autorotating Wing (SAW). This platform, published earlier this year in IEEE Transactions on Robotics, is able to achieve two flight modes (autorotation and diving) with just one actuator. It is ideal for deploying single-use sensors to remote locations. For example, we can use the platform to deploy sensors for forest monitoring or wildfire alert system. The sensors can land on tree canopies, and once landed the wing provides the necessary area for capturing solar energy for persistent operation over several years. Another interesting scenario is using the autorotating platform to guide the radiosondes back to the collection point once its journey upwards is completed. Currently, many radiosondes are sent up with hydrogen balloons from weather stations all across the world (more than 20,000 annually from Australia alone) and once the balloon reaches a high altitude and bursts, the sensors drop back onto the earth and no effort is spent to retrieve these sensors. By guiding these sensors back to a collection point, millions of dollars can be saved every year—and also [it helps] save the environment by polluting less.
Source: IEEE Spectrum